About DHI's MPC framework¶
DHI's Model Predictive Control (MPC) framework is designed to handle real-time control of a variety of water networks. The framework combines a fast-solvable optimisation model with evaluation and realignment by a detailed hydrological-hydrodrodynamic model. The idea is to have a basic "water network optimisation engine", which optimises flow through controllable structures such as gates, valves and pumps. The optimisation is repeated in forward moving time windows, and only the first part of the optimised flows is applied at the controllable structures, because after a while a new optimisation result becomes available.
The optimisation is based on a fast surrogate model of the water network, which paves the road for fast optimisation. The speed of the optimisation is a key factor, both in the operational real-time system, and during the configuration phase. In the operational system, the value of the optimisation result is larger, if it has not become old news when the computation finishes. For example, in urban drainage systems the time between two optimisations is of the order of minutes, so the optimisation itself should not last an hour. In the configuration phase, a fast optimisation facilitates that runtime is not a bottleneck for investigating different weight combinations for the optimisation configuration.
Benefits of MPC¶
Traditionally, real-time operation of water systems is carried out using rule-based regulation of individual or small groups of coordinated control structures. There is a large potential for improving operational efficiency by global dynamic optimisation of the operation of all control structures within the water system. The global optimisation caters for coordination of operation of structures, and thereby facilitates a system-wide prioritisation of sharing when water is scarce and of directing flood loads to prioritised locations in times of plenty. The optimisation is based on a dynamic surrogate model of the water network, which predicts the future system state as a function of three inputs: 1) initial state, 2) forecasted boundaries and 3) control actions. This means that the optimistation takes the expected future system state into account, when deciding on the best operation "now".
How MPC works¶
A core element of MPC is the rolling horizon principle. The control actions of the water system are optimised over a time window which starts "now" and ends in the future. This time window is termed the control horizon. Only the first part of the optimised flow time series is sent to the regulators. In the meantime, a new optimisation is run, and this will include information that was not available in the previous control horizon.
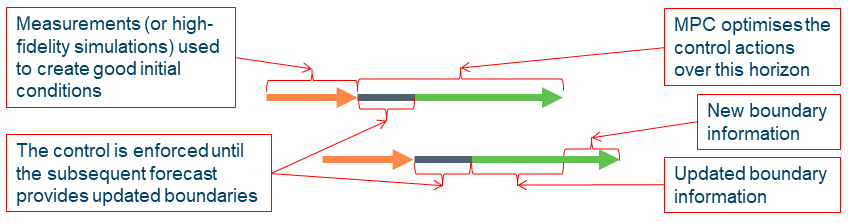
The length of the control horizon depends on the travel times in the water network in question, ranging from a few hours for urban drainage systems to days or weeks for a river network.
In everyday language, MPC's rolling horizon corresponds to always planning a fixed amount of time ahead, start executing the plan and re-evaluate the plan at regular intervals.
Which water networks?¶
The MPC framework's optimisation engine has a modular structure, which is open to adding dynamic models for new types of water networks. At present (2021, Q4), the implementation status is the following
- open channels (rivers and reservoirs, irrigation systems)
- urban drainage systems (sewers - limited to cases without severe backwater effects)
We have got a prototype for
- pressurised systems (drinking water distribution), see CHAIN RTC robot documentation
Ideas for future extensions are
-
hydropower networks (based on a river and reservoir network)
- optimise the amount of generated hydropower
- optimise the sales price by planning to maximise the turbine flow when the sales price is high (a proof-of-concept has been made in 2019)
-
networks where the operation depends on concentration